1. The Target algorithm.
Given a certain 2D (regular column) or 3D (Digital Horn) speaker, we define a point in space to concentrate all the drivers.
Target algorithm. Consider the point of interest as the center of a circle; give delays to each driver so they all become part of that circle — and thus, all arrive at the target at the same time.
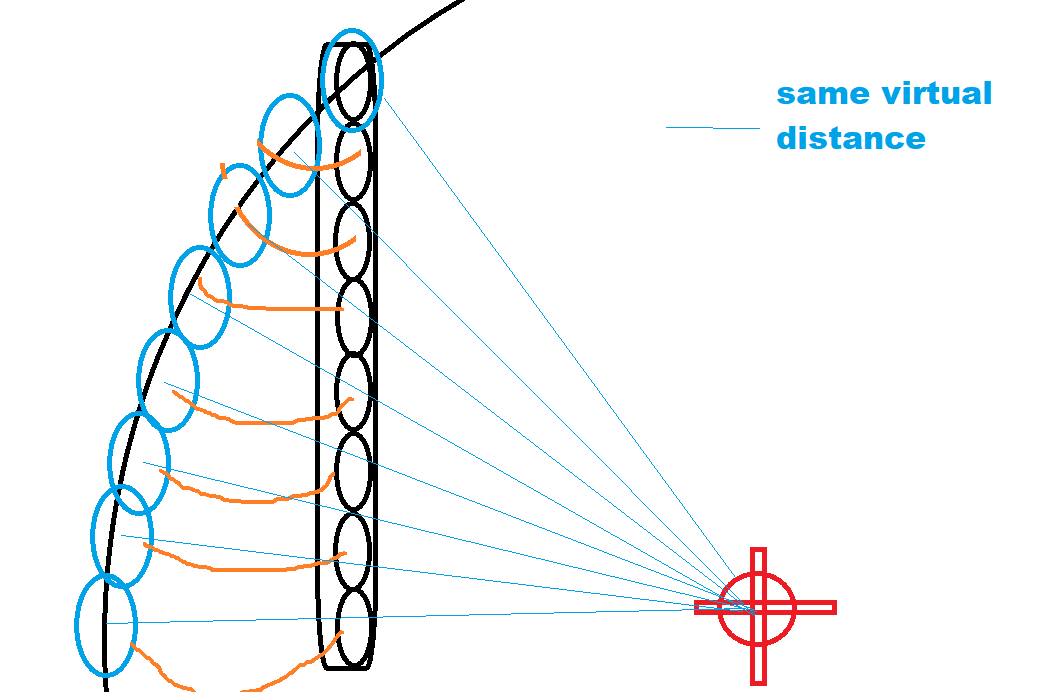
There are different ways to achieve this, but mainly we stick with the farthest driver as the radius of the virtual circle. Each driver is virtually "rotated" so they all arrive at the same time.
Target is a coordinator of arrivals.— the simplest definition
In a 3D speaker — such as our future ones — a virtual sphere is created instead of a circle, which allows asymmetrical coverage and more.
Simulation example — natural, then Target.
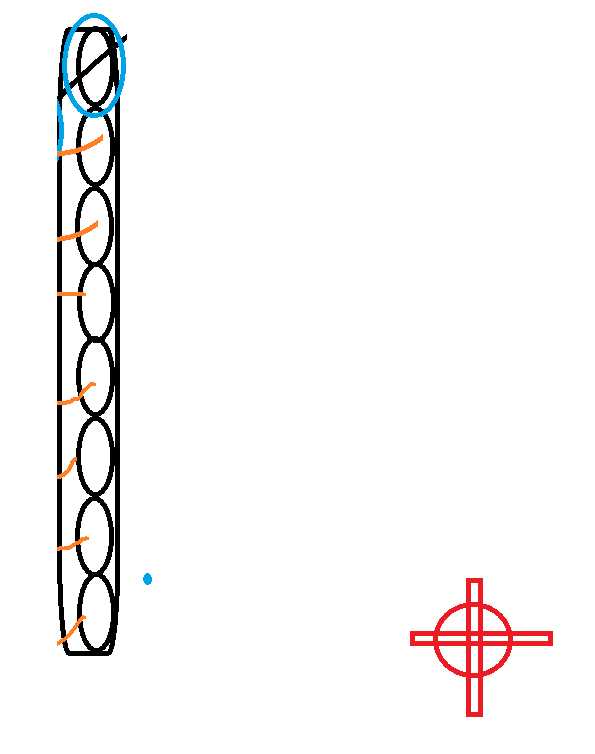
First — the natural response of the 8 × 4" column.
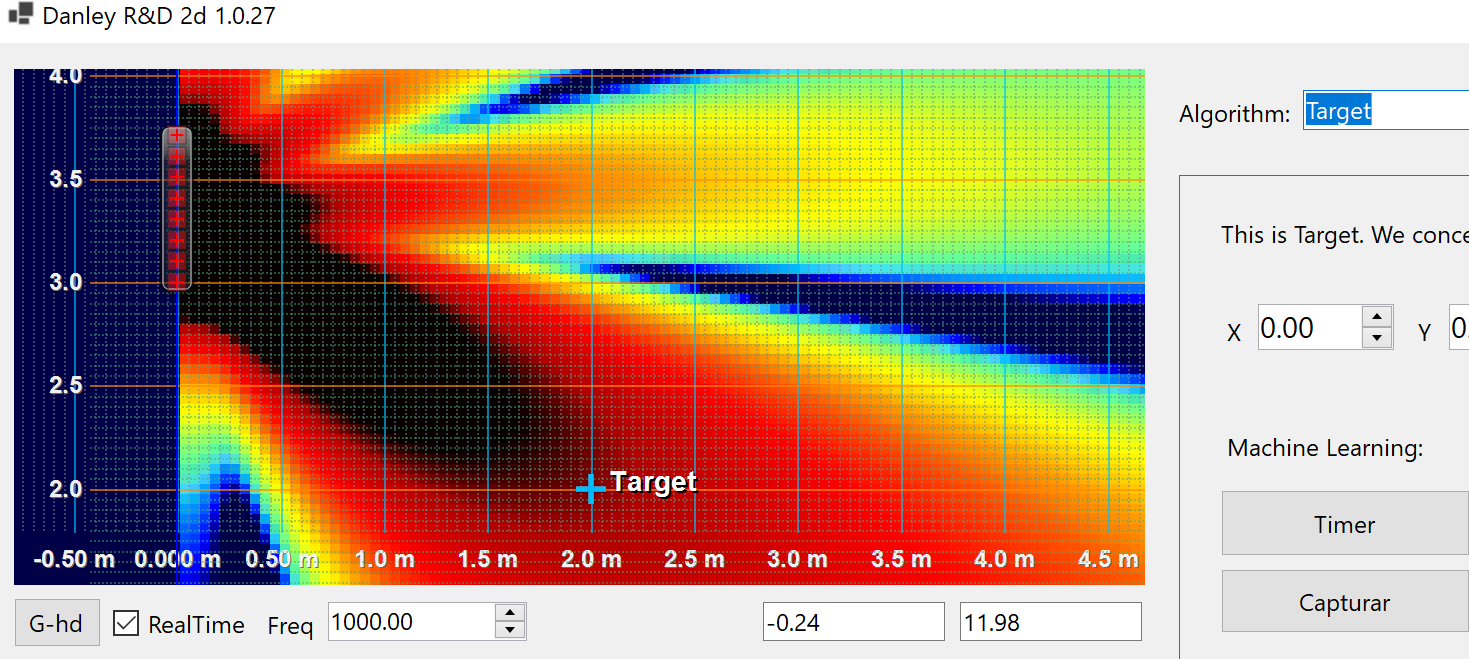
Now with the Target approach applied — the arrivals synchronised.
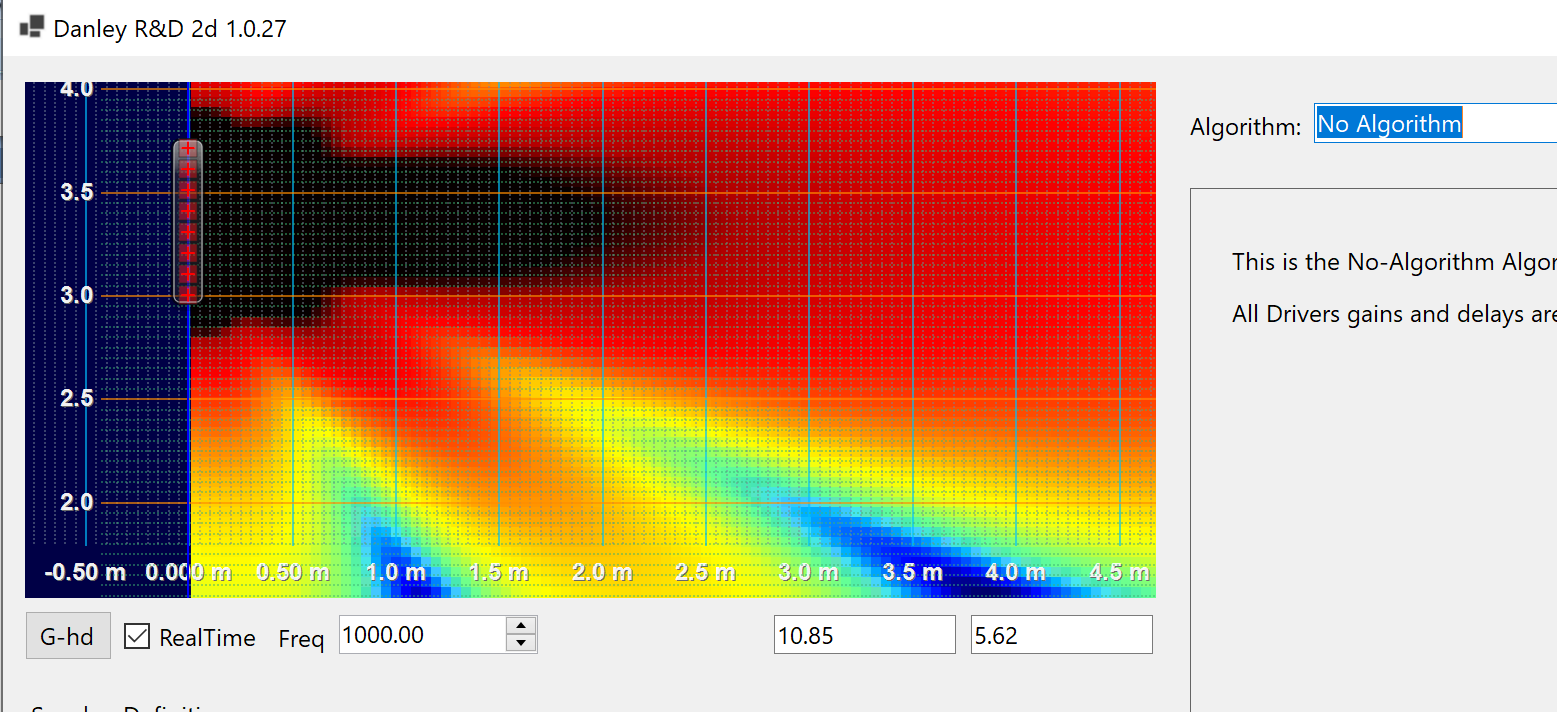
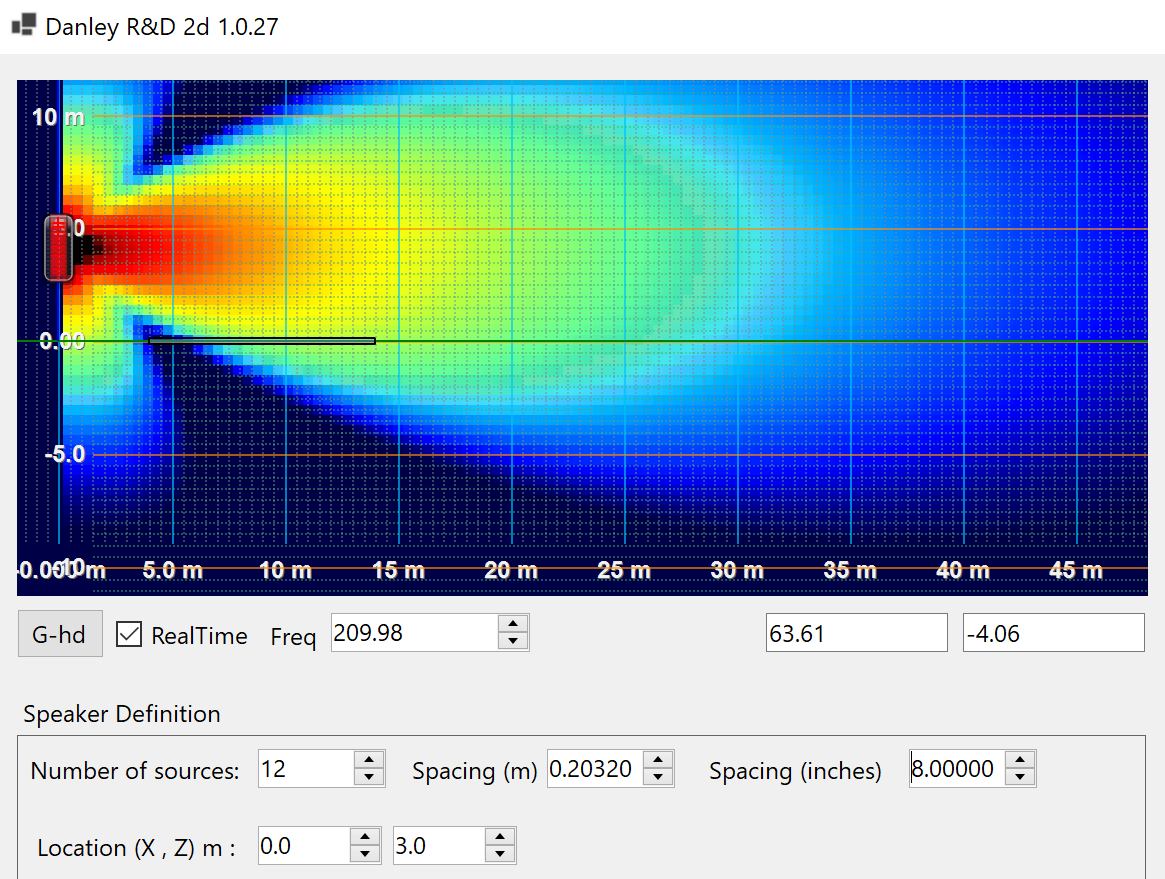
2. No-Algorithm.
This is as simple as looking at the natural response of a system. It can give insights about the separation / number of drivers for different situations and frequencies.
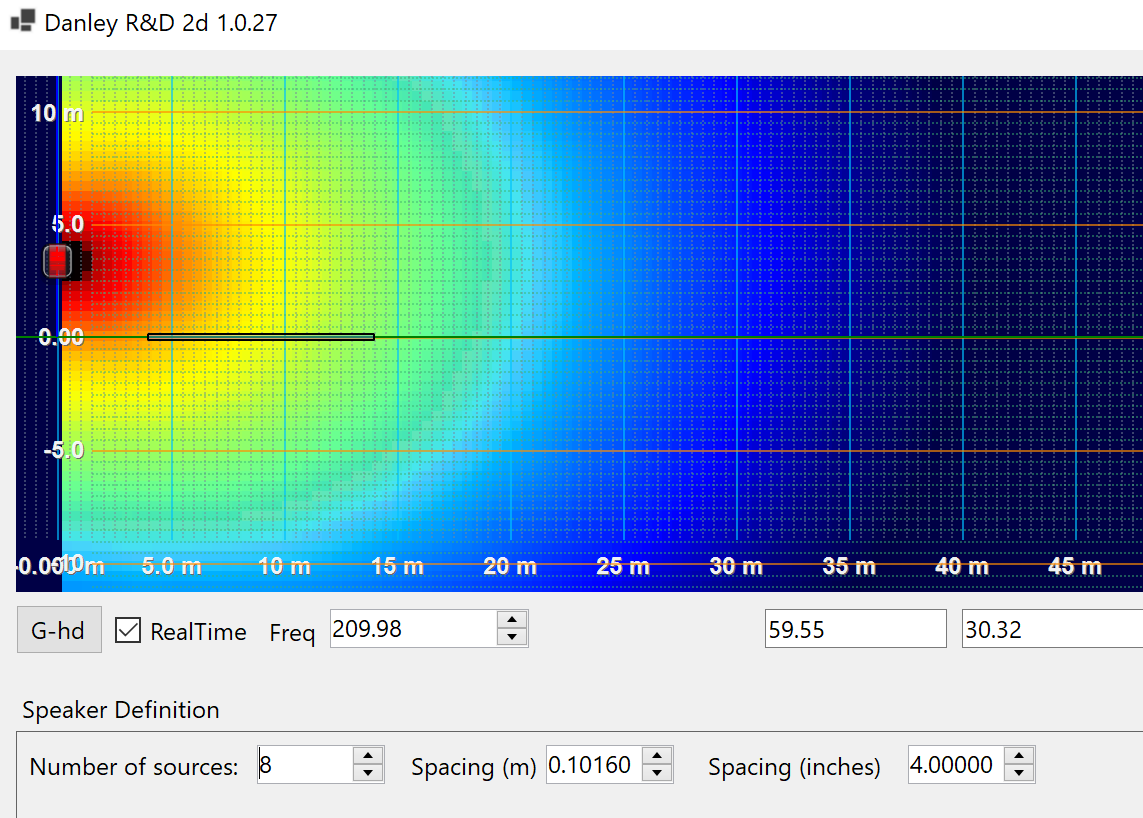
8 sources at 4" spacing vs 12 sources at 8" spacing. 200 Hz. The Real-Time option is very good to see coverage changes on the fly.
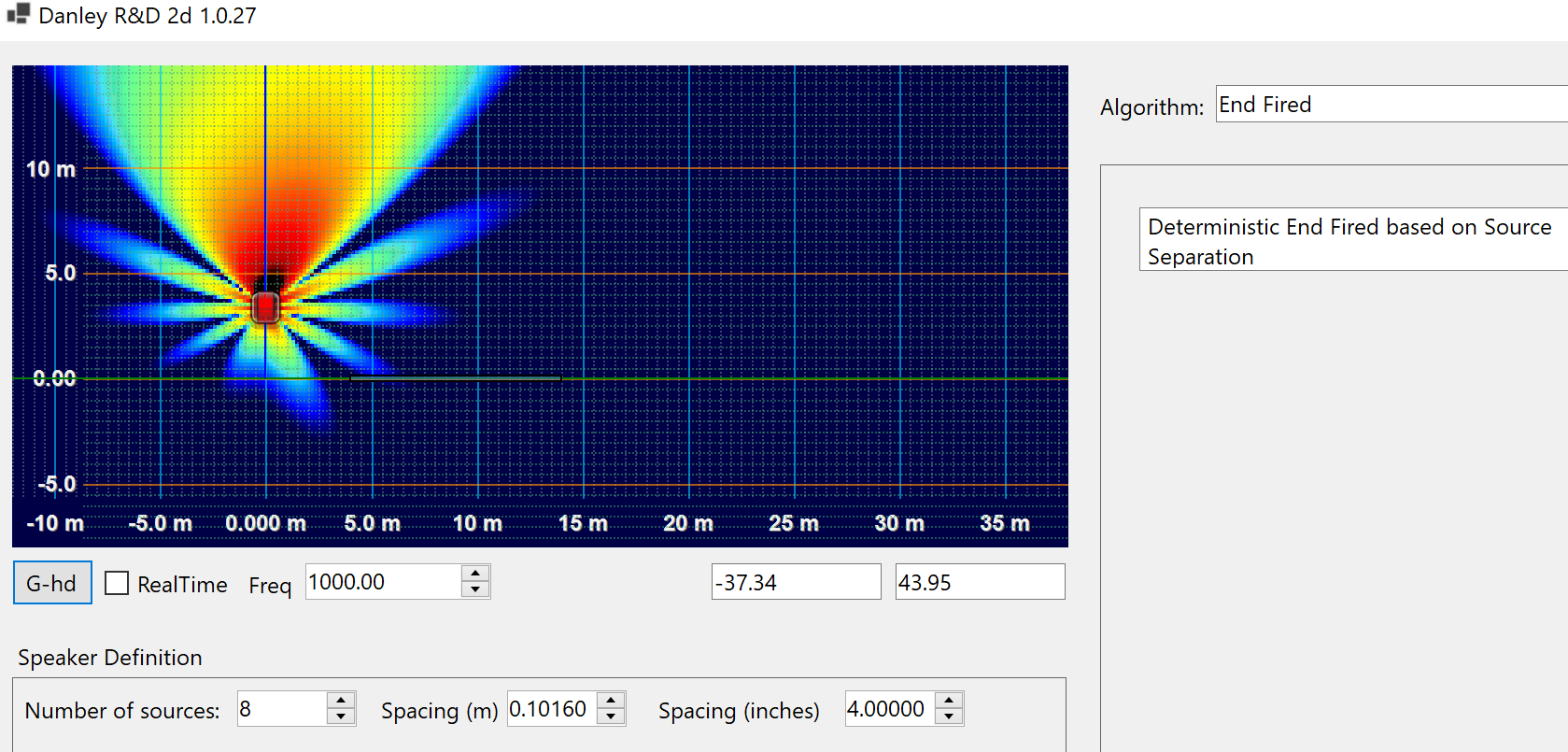
3. End-Fired.
Straightforward. End-fired, to study for the given separation of drivers, number of them, frequency, etc. Same as the No-Algorithm, this control has not many parameters to change in itself — it depends on the general parameters of the speaker. It is present mostly for 2D, and for supporting Tom with his end-fired endeavours.
End-fired — HD.
4. Point-Open-Shoot.
This is a very flexible approach, and sometimes the base for automatic-calculation purposes — whether deterministic, semi-AI (genetic algorithms, swarms, birds), or machine learning. For the moment it is capable of combining two parameters.
Point — an extreme situation, but good to address using this technique.
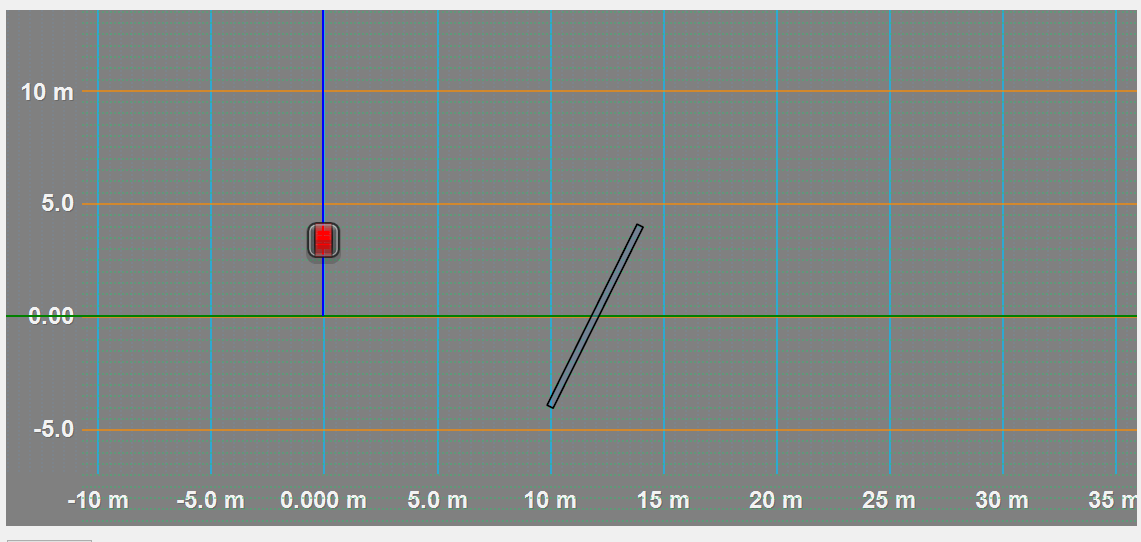
Point — a different case.
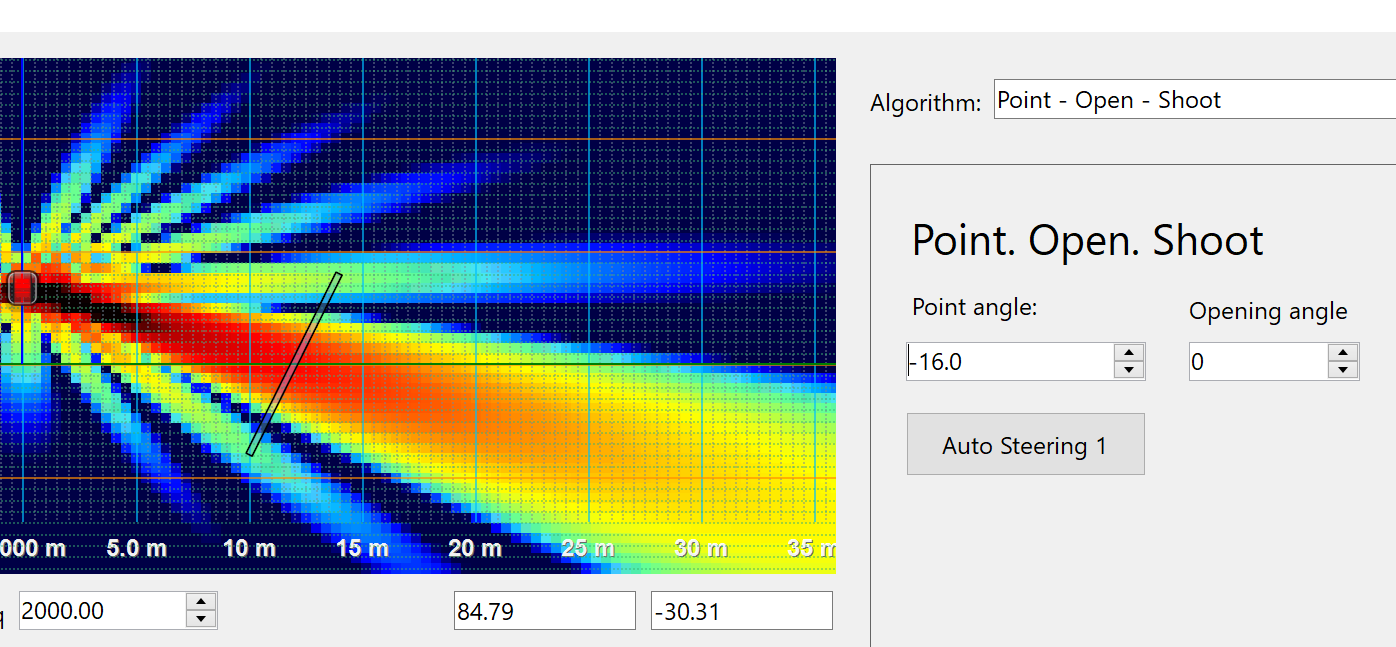
Open & shoot. Point and Open are based on equivalent parameters geometrically — delays for pointing, then delays for "opening".
We also have an Auto-Steering already working. I will talk about it in new numbers of the diaries.
Regards.
— Sebastián.